
Design for the Modern World
Experiential + Metaverse Design since 2016
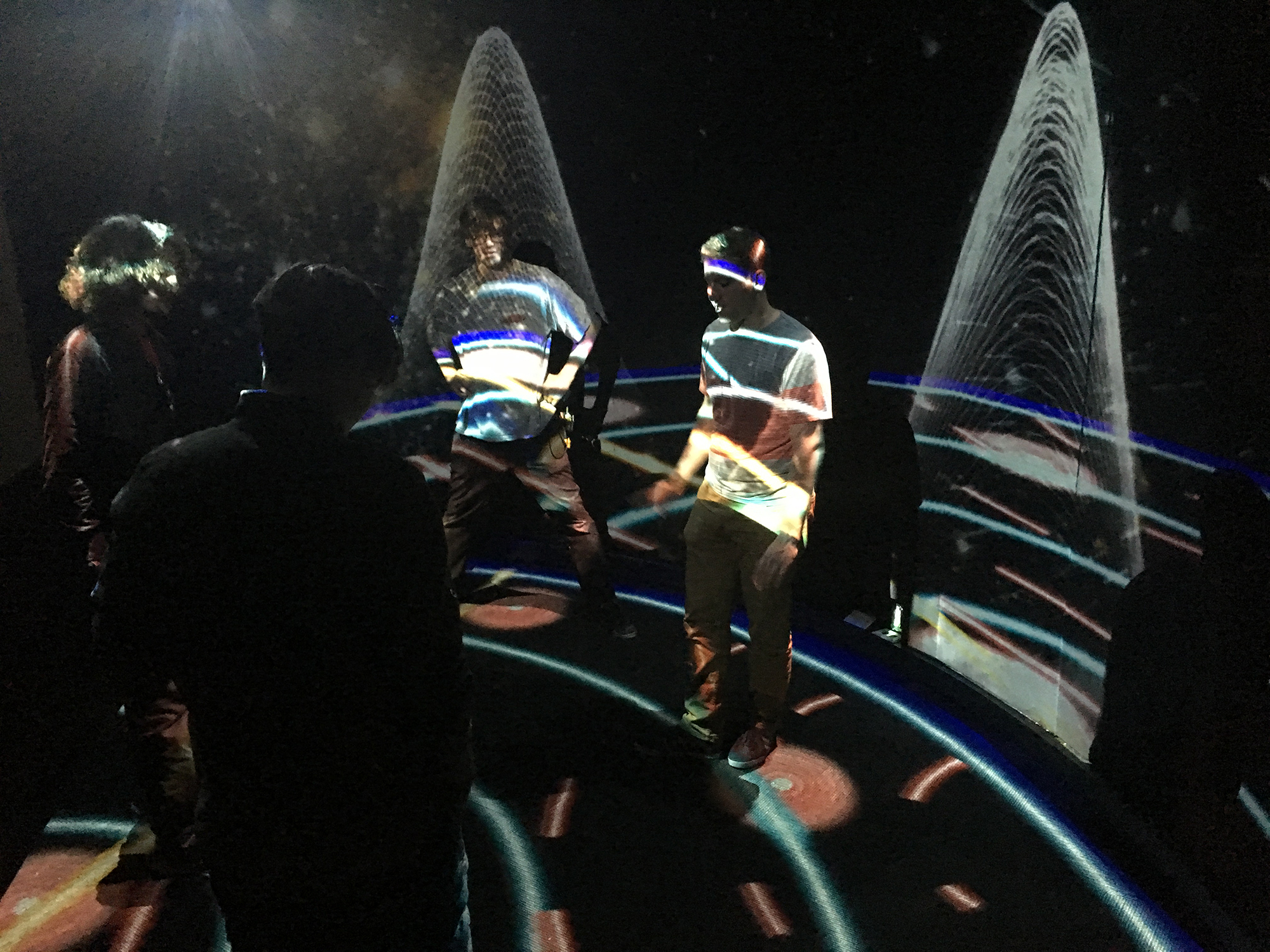
Metaverse Design, Projection Mapping, LED Tunnels, Consulting, and XR experiences.
Our Ethos
Alt Ethos embodies innovation and authenticity. Beyond design, we’re reshaping experiential interactions. Merging technology with human connection, our ethos is rooted in creativity, collaboration, and vision. As we navigate the Metaverse, Immersive Design, and XR, our core values guide each transformative project, ensuring lasting impact and resonance.
8 Year in Business
⭐⭐⭐⭐⭐ Rating
Years of Experience
Projects
%
Retention Rate
Collaborative Awards
Popular Services
Transform your space and captivates audiences.
Harness innovative solutions to drive deeper engagements.
Elevate your presence.
Become the destination everyone seeks.
CASE STUDIES
How We Transform Client Visions

XR Consulting
A Library’s Innovative Approach to Strengthening Community Bonds through Annual Tech Dialogues.

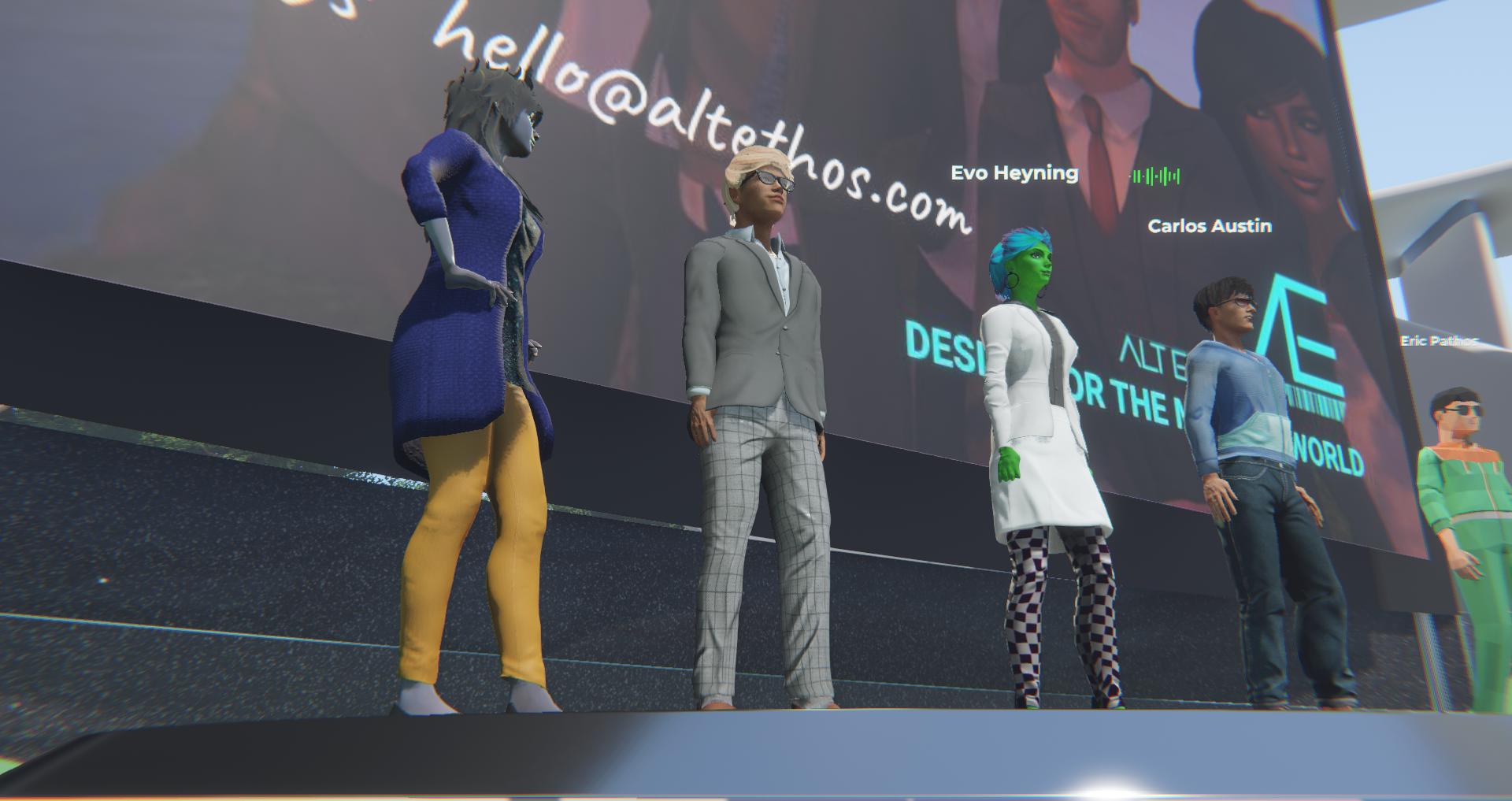
Metaverse World
A Case Study on Fan Engagement and NFT Integration for a Block Buster Cinematic Release.

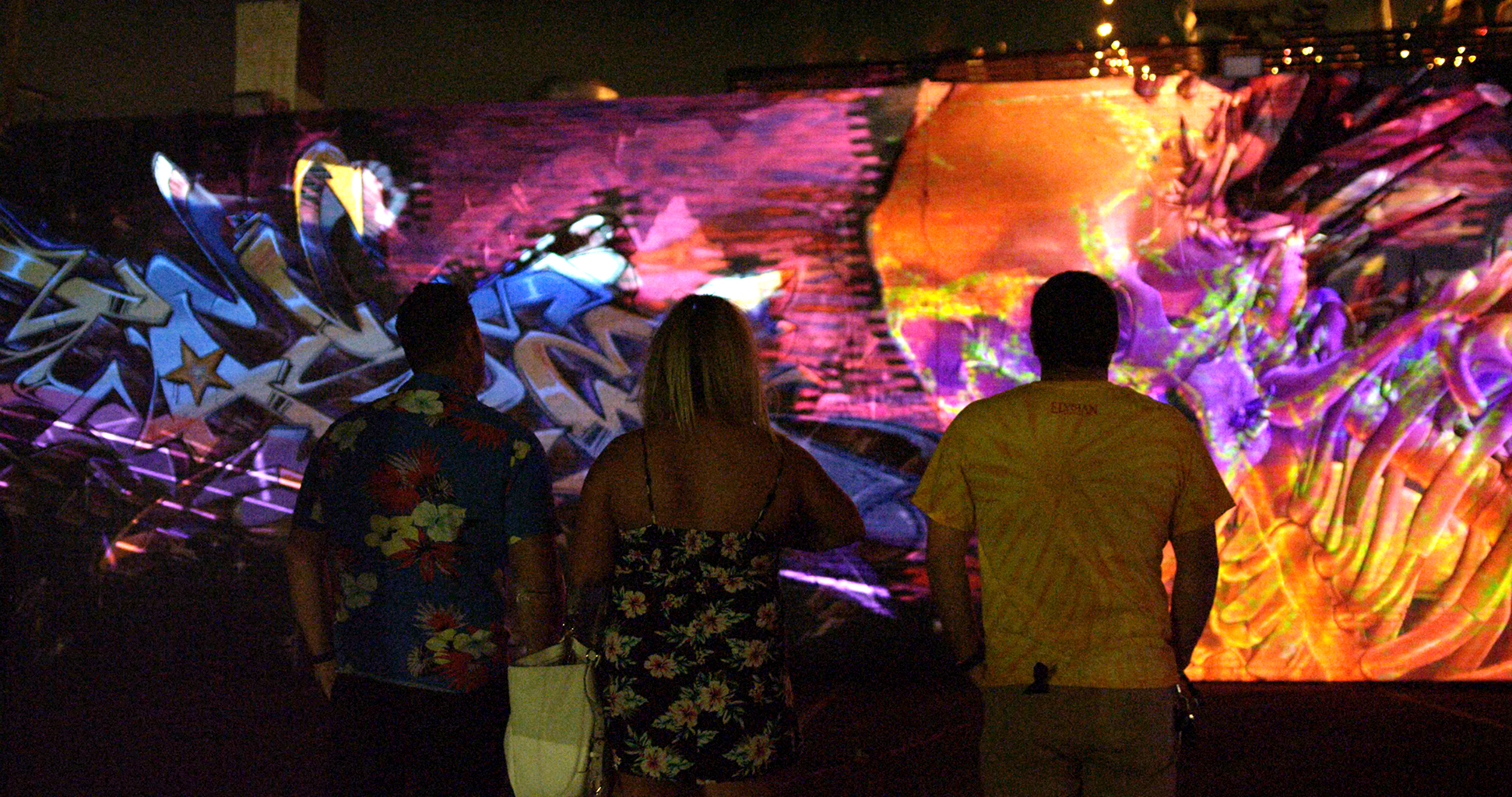
Projection Mapping
Enhancing Safety and Amplifying Foot Traffic for Engaging Urban Renewal.

Event Engagement
Turning an annual event into the year’s highlight with more selfies and smiles!

Virtual Event Engagement
Connection in the Metaverse, making virtual events unforgettable.
Testimonials
Client Success is at the heart of what we do.
“I really enjoyed working with you… and I also really appreciate the ethos in Alt Ethos 🙂 “
“Working with the team was fascinating, the job was professionally executed, and the outcome exceeded our expectations.”
“[The Vikram World] was very successful from a user perspective and income we are very happy with.”
Great event last night! I was really impressed with your designs. It was a lot of fun just roaming – and of course, flying!
“Alt Ethos is a great crew to work with! We have a project that the museum is proud of and that surprises and delights all of our guests!”
Blog News
Dive into the world of technology with Alt Ethos. With over three decades of expertise, we combine research with hands-on experience. Stay updated and inspire your creativity. Subscribe now for our latest insights.
The Future of Grand Entrances: The LED and Projection Tunnel Experience
In today's fast-paced world of events and experiences, the saying "First impressions matter" has never been more relevant. Whether you're hosting a tech conference or a high-end gala, the entrance you craft sets the tone for the entire event. It's the very first...
Unveiling the Remarkable Trends at Augmented World Expo (AWE)
The Augmented World Expo (AWE) recently took place, showcasing the latest advancements in extended reality (XR) technology. This groundbreaking event left attendees in awe as they explored the exhibition floor, discovering remarkable trends that are reshaping our...

Unveiling the Distinction: AR vs. VR – Exploring the World of Immersive Experiences
In today's rapidly advancing technological landscape, Augmented Reality (AR) and Virtual Reality (VR) have emerged as prominent players, revolutionizing the way we interact with digital content. These two technologies can be confusing to most. While both AR and VR...



















Copyright © 2023 Alt Ethos Ltd. All rights reserved.